
- Todo
- Nombre del producto
- Palabras clave
- Modelo de producto
- Resumen del producto
- Descripción del producto
- Búsqueda de texto completo

 |
















| Cantidad: | |
|---|---|
SLJ-150C
Descripción del Producto
Información básica.
| Condition | Nuevo | Solicitud | Uso para manipular Coton Bale en la industria textil. | |
| Tipo | Manipulador con dispositivo de sujeción | Capacidad | 50 kg-500 kg, personalizado | |
| Trazo arriba y abajo | 0-2000 mm, personalizado | Radio de trabajo | 2500-3000 mm, personalizado | |
| Altura máxima | 3500 mm, personalizado | Diseño básico | Sujeción, elevación, rotación | |
| Formulario de instalación | Personalizado | Especificación | Personalizado | |
| Paquete de transporte | Caja de madera | Origen | Porcelana | |
| Marca comercial | Escott o personalizado | Capacidad de producción | 100 unidades/mes |
Introducción general
Somos un fabricante líder en China que se centra en la producción de brazos manipuladores y equipos de manipulación inteligentes y semiinteligentes.Contamos con más de 10 años de experiencia.
El manipulador industrial es un tipo de equipo de asistencia diseñado utilizando principios de dinámica y ergonomía.Se opera manualmente a través de botones, utilizando herramientas fijas para transferir objetos.
Presentamos el manipulador como una herramienta útil para el manejo.Transfiere eficientemente objetos irregulares, pesados y especiales, ahorrando y protegiendo así la mano de obra.Como resultado, se utiliza cada vez más en procesos de producción industrial.
Los manipuladores industriales imitan los movimientos de las manos humanas para agarrar y transportar mercancías, lo que puede reducir eficazmente la mano de obra y los costos laborales.
Nuestras soluciones son todas diseños no estándar caso por caso, satisfaciendo plenamente las diferentes necesidades de cada cliente y hechas a medida.La altura, el alcance, la carrera de elevación, la capacidad de carga, la apariencia, el color y la forma de instalación del equipo se personalizan según el espacio y las necesidades del sitio.Al mismo tiempo, el sistema de sujeción no estará estandarizado en absoluto y se personalizará para que sea el más adecuado para la manipulación de piezas de trabajo.
Boceto de diseño para diferentes tipos de cargas.
 |  |
 |  |
Descripción de Objeto de trabajo
El cliente de este equipo es un famoso fabricante japonés de pañales.Se utilizan robots industriales para mover grandes fardos de algodón.Instalamos una abrazadera neumática personalizada en el brazo del robot y controlamos el brazo del robot y su abrazadera a través de los botones en el panel para transportar las balas de algodón en la línea de ensamblaje.Nuestros robots son adquiridos por un gran número de empresas nacionales y también exportados al extranjero.
Personalizamos nuestros productos para satisfacer plenamente las necesidades refinadas de cada cliente.La altura, la extensión del brazo, la carrera de elevación, la capacidad de carga, el color de apariencia, la forma de instalación, etc. del equipo se personalizan de acuerdo con el espacio y las necesidades del sitio.El sistema de sujeción se personalizará completamente para adaptarse a las necesidades de manipulación de la pieza.
Algunos otros tipos de herramientas para accesorios para su referencia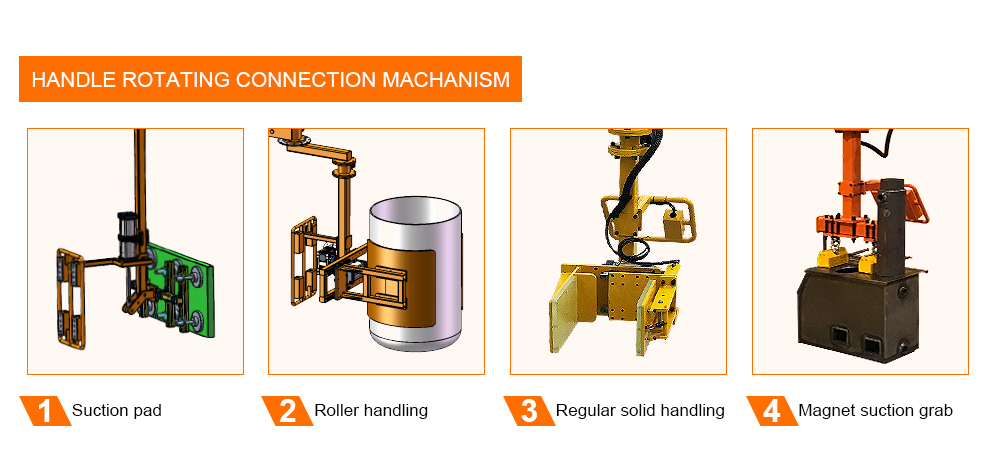
Forma de instalación
Cada instalación tiene sus propias ventajas y se basa totalmente en la necesidad del proyecto y las condiciones de trabajo del taller del cliente.
1.Columna fija: la mayoría de opciones
2.Columna móvil
3. Techo fijo (instalación en pared)
4. Corriendo por encima (mediante carro deslizante)
Guía de funcionamiento del producto
1. Diseño básico: el equipo se puede levantar y girar libremente en 360 grados, lo que puede completar la acción de desplazamiento de carga espacial tridimensional durante el agarre, manipulación, elevación y acoplamiento de la pieza de trabajo, y puede cumplir con los requisitos de extracción de material.
2. Plataforma de operación: equipada con un sistema de control de carga, el agarre, transferencia y extracción del material se puede realizar a través del botón de control;La pinza mecánica debe garantizar que la pieza de trabajo pueda agarrarse, moverse y descargarse sin problemas.
3. Protección de seguridad: equipado con un dispositivo de protección de seguridad contra mal funcionamiento (el trabajo no está en su lugar, la pieza de trabajo no se puede descargar), sistema de control de seguridad de soporte (el manipulador no subirá ni bajará rápidamente debido a un mal funcionamiento), dispositivo de freno.













