
- Todo
- Nombre del producto
- Palabras clave
- Modelo de producto
- Resumen del producto
- Descripción del producto
- Búsqueda de texto completo

 |
















| Cantidad: | |
|---|---|
SLJ-150D
Descripción del Producto
Información básica.
| Condition | Nuevo | Solicitud | Úselo para manipular varillas de silicio, objetos similares a varillas, cilindros y rollos. | |
| Tipo | Manipulador con dispositivo de sujeción | Capacidad | 100 kg-300 kg, personalizado | |
| Trazo arriba y abajo | 0-2000 mm, personalizado | Radio de trabajo | 2500-3000 mm, personalizado | |
| Altura máxima | 3500 mm, personalizado | Diseño básico | Sujeción, elevación, rotación | |
| Formulario de instalación | Personalizado | Especificación | Personalizado | |
| Paquete de transporte | Caja de madera | Origen | Porcelana | |
| Marca comercial | Escott o personalizado | Capacidad de producción | 100 unidades/mes |
Introducción general
El manipulador se opera mediante botones y utiliza herramientas especializadas para agarrar y mover objetos.
El manipulador se utiliza habitualmente en las siguientes situaciones:
1.Cuando un objeto es demasiado pesado o grande para moverlo manualmente.
2. Cuando es difícil encontrar el ángulo y la posición correctos para reubicar manualmente un objeto.
3. Cuando la reubicación manual de objetos puede generar un desperdicio significativo.
4.Cuando la reubicación manual de objetos puede suponer una reducción importante de la plantilla.
Para superar estos desafíos, los manipuladores están diseñados para mover de manera eficiente artículos irregulares, pesados y únicos, protegiendo así a la fuerza laboral.Por lo tanto, los manipuladores son cada vez más populares en diversos procesos de producción industrial.
Los manipuladores industriales pueden manipular fácilmente cualquier producto con un peso de hasta 500 kg utilizando únicamente aire comprimido.
Los objetos operativos incluyen paletizado de cajas, descarga de material, línea de subida y bajada de carretes, manipulación de bolsas, manipulación de piezas metálicas, trasplante de varillas de silicona, montaje y piezas de automóviles, etc. El manipulador industrial puede equilibrar perfectamente el peso de la carga gracias a la operación. modo de 'ingravidez' y 'equilibrio de gravedad cero'.
Boceto de diseño para diferentes tipos de cargas.
 |  |
 | 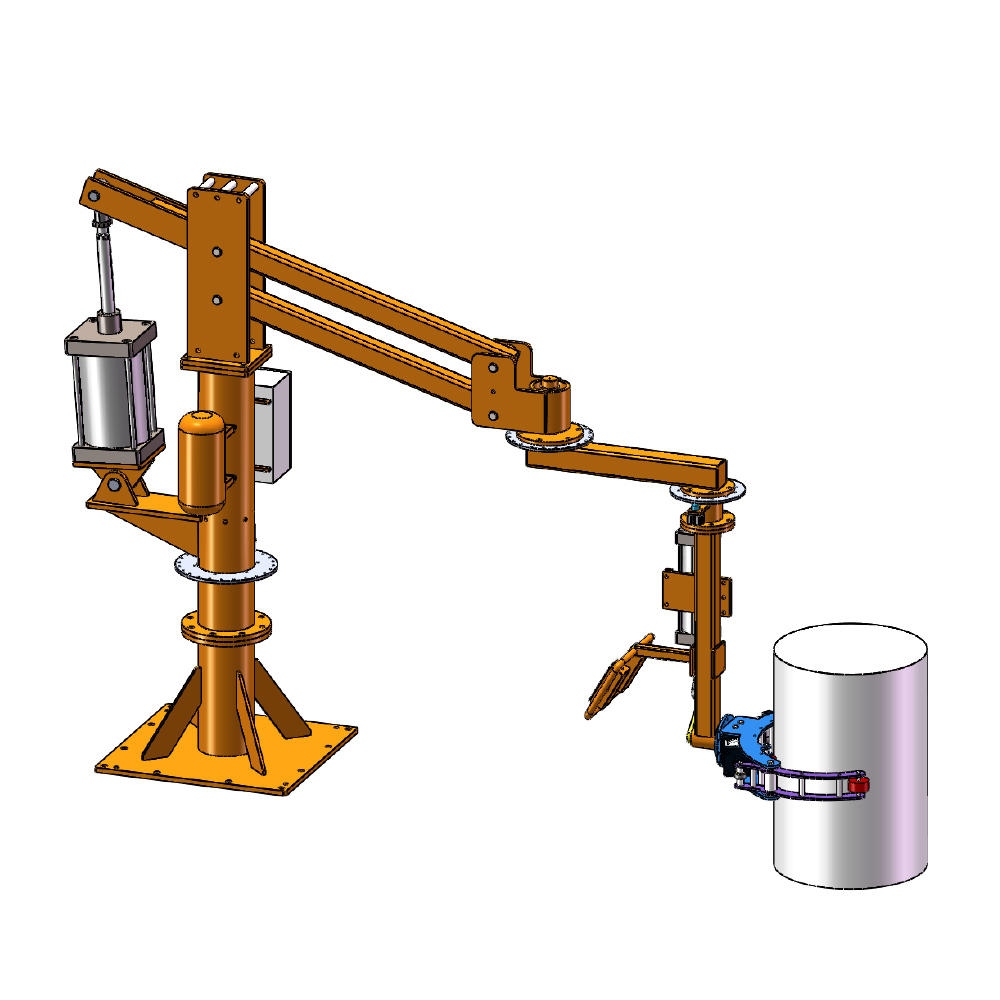 |
Descripción del objeto de trabajo
Este manipulador utiliza su pinza mecánica para recoger la varilla de silicio de una posición, girarla hasta una postura adecuada y colocarla en otra posición.Después de completar un paso de procesamiento, la ventosa aspira el silicio y lo coloca en la posición adecuada.Según el principio de funcionamiento anterior, este equipo también se puede ampliar para manipular otros objetos con forma de varilla, cilindros y rodillos.
Guía de funcionamiento del producto
1. Plataforma de operación: equipada con un sistema de control de carga, el agarre, transferencia y extracción del material se puede realizar a través del botón de control;La pinza mecánica debe garantizar que la pieza de trabajo pueda agarrarse, moverse y descargarse sin problemas.
2. Protección de seguridad: equipado con un dispositivo de protección de seguridad contra mal funcionamiento (el trabajo no está en su lugar, la pieza de trabajo no se puede descargar), sistema de control de seguridad de soporte (el manipulador no subirá ni bajará rápidamente debido a un mal funcionamiento), dispositivo de freno.













