
- Todo
- Nombre del producto
- Palabras clave
- Modelo de producto
- Resumen del producto
- Descripción del producto
- Búsqueda de texto completo

 |
















| Cantidad: | |
|---|---|
SLJ-100B
Descripción del Producto
Información básica.
| Condition | Nuevo | Solicitud | Uso para manipular perfiles metálicos, y otras cargas de forma regular | |
| Tipo | Manipulador con accesorio de ventosas | Capacidad | 300 kg, personalizado | |
| Trazo arriba y abajo | 0-1600 mm, personalizado | Radio de trabajo | 2500-3000 mm, personalizado | |
| Altura máxima | 3500 mm, personalizado | Diseño básico | Sujeción, elevación, rotación | |
| Formulario de instalación | Instalación en tierra, personalizada | Especificación | Personalizado | |
| Paquete de transporte | Caja de madera | Origen | Porcelana | |
| Marca comercial | Escott o personalizado | Capacidad de producción | 100 unidades/mes |
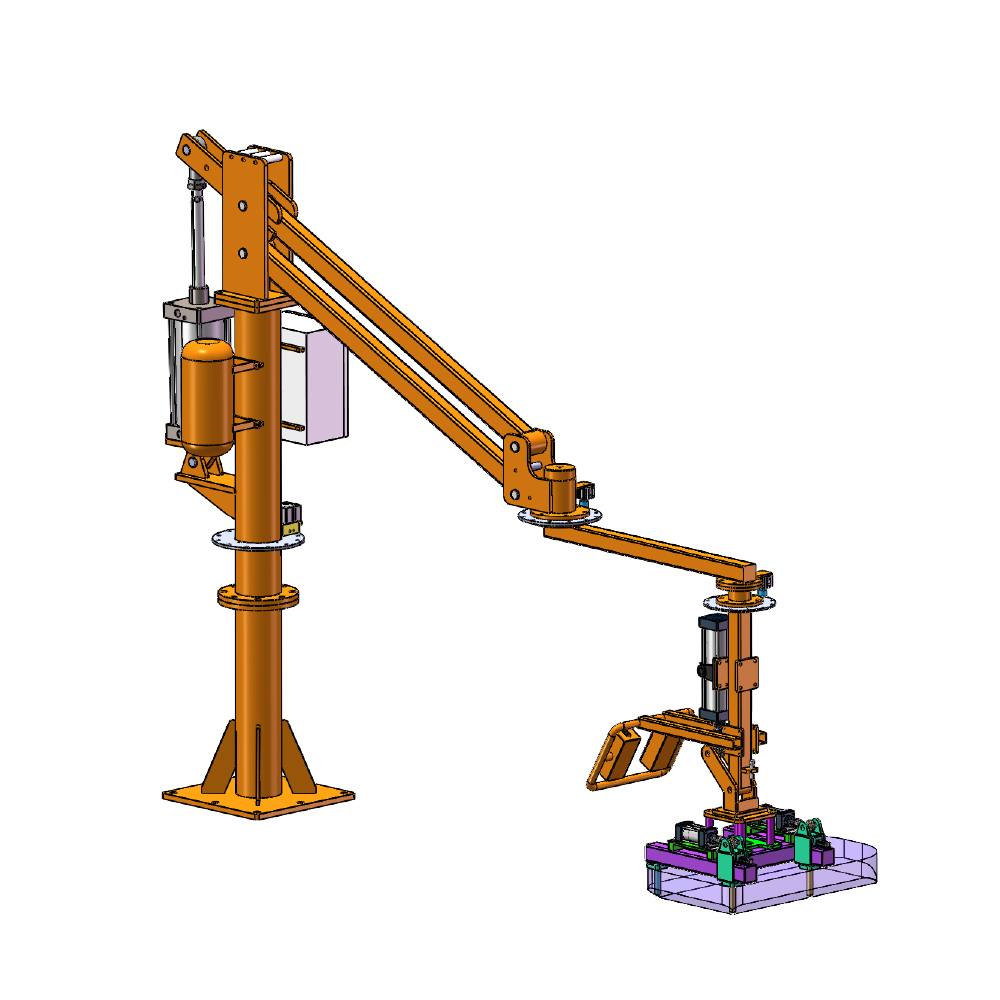
Introducción general
El manipulador industrial es un conjunto de equipos que ayudan en las tareas de manipulación.Está diseñado centrándose en la dinámica y la ergonomía.El manipulador se opera mediante botones manuales y utiliza herramientas fijas para agarrar y transferir objetos.
Los principales escenarios donde se utiliza el manipulador son:
1. Cuando el objeto es demasiado pesado o grande para manipularlo manualmente.
2.Cuando sea difícil lograr el ángulo y la posición deseados para transferir el objeto manualmente.
3.Cuando la transferencia manual del objeto puede provocar una gran pérdida.
4.Cuando la transferencia manual del objeto puede resultar en una pérdida significativa de mano de obra.
Para abordar estas situaciones, hemos introducido el manipulador como una herramienta para ayudar en el manejo de tareas.Esta herramienta ha demostrado ser eficaz para transferir de manera eficiente objetos irregulares, pesados y especiales.Ayuda a ahorrar y proteger la mano de obra y su uso es cada vez más común en los procesos de producción industrial.
Croquis de diseño para diferentes tipos de cargas:
 |  |
 |  |
Descripción del objeto de trabajo
Este tipo de diseño utiliza ventosas como herramienta de fijación y se usa comúnmente en perfiles metálicos, tableros, puertas y vidrio durante la producción.Nos encontramos con varios escenarios de aplicación, pero en la mayoría de los casos, los objetos sobre los que se trabaja deben tener una superficie plana y lisa para que la succión funcione correctamente.
1.La superficie debe ser uniforme y sin irregularidades.
2.El material del objeto debe poseer suficiente resistencia.
3.El peso suele oscilar entre 50 y 300 kg, y el tipo y la cantidad de ventosas se determinarán en función de la carga de trabajo.
Forma de instalación: La forma de instalación se basa en la condición del taller.
1.Columna fija
2.Columna móvil
3. Techo fijo (instalación en pared)
4. Corriendo por encima (mediante carro deslizante)
Ventaja del producto
Los manipuladores industriales son equipos que ayudan en la manipulación en las líneas de producción.El equipo tiene las características de operación simple, seguridad, confiabilidad y mantenimiento conveniente.Se puede lograr un procesamiento rápido de piezas de trabajo con simples operaciones de botón.Actualmente es el robot industrial más avanzado.Es un equipo de manipulación ideal para líneas de producción modernas, almacenes, etc.
Tiene alta estabilidad y funcionamiento sencillo.Al adoptar un control neumático total, solo necesita operar el interruptor de control para completar el proceso de manipulación de la pieza de trabajo.Alta eficiencia y ciclo de transporte corto.Una vez iniciado el transporte, el operador puede controlar el movimiento de la pieza de trabajo en el espacio con muy poca fuerza y puede detenerla en cualquier posición.El proceso de envío es simple, rápido y consistente.
Escenario de aplicación














